



A research collaboration by Arjon Turnip, Muhamad Arsyad Faridhan, and Bambang Mukti Wibawa from the Department of Electrical Engineering, Universitas Padjadjaran, Indonesia, together with Nursanti Anggriani from the Department of Mathematics, Universitas Padjadjaran, Indonesia, has developed a trajectory planning method for autonomous medical robots using the Local Planner Time Elastic Band (TEB) algorithm.
The problem addressed is that medical robots require precise and adaptive navigation in complex environments such as hospitals and clinics. Traditional trajectory planning approaches often struggle with real-time adjustments when facing dynamic obstacles or narrow pathways, limiting their effectiveness in healthcare applications.
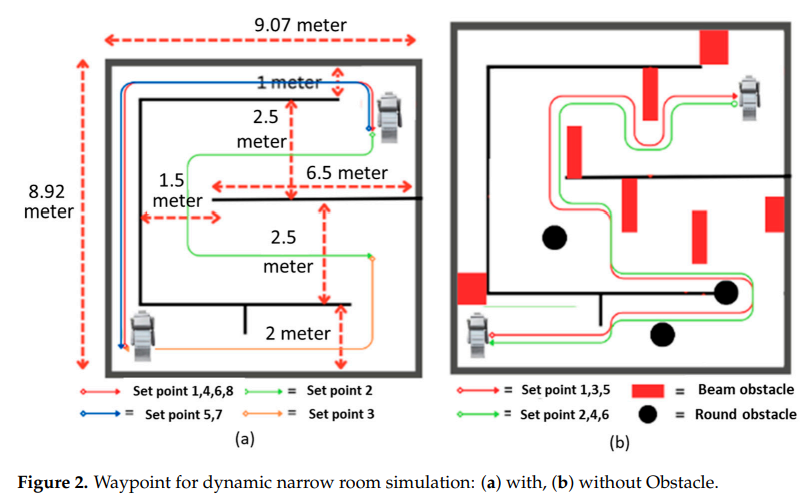
To solve this, the researchers applied the TEB algorithm as a local planner, allowing robots to generate safe, smooth, and time-efficient trajectories while dynamically adapting to environmental changes. The model was tested in simulation environments, demonstrating its ability to optimize path planning under constraints relevant to medical settings.
The study shows that the Local Planner TEB algorithm significantly improves robot adaptability and navigation efficiency compared to standard methods. This advancement supports the development of autonomous medical robots capable of assisting in patient care, logistics, and hospital operations with higher safety and reliability.
This research contributes to several United Nations Sustainable Development Goals (SDGs):
- SDG 3 (Good Health and Well-Being): by enabling advanced robotic technologies that enhance patient care and medical services.
- SDG 9 (Industry, Innovation, and Infrastructure): through innovation in robotics and intelligent systems for healthcare.
- SDG 4 (Quality Education): by fostering interdisciplinary learning in engineering, mathematics, and medical technology.
- SDG 17 (Partnerships for the Goals): by strengthening collaboration across engineering and mathematical sciences.
Overall, this study highlights how robotics and advanced trajectory planning algorithms can revolutionize healthcare operations, making medical robots more efficient, adaptive, and reliable in real-world applications.
15_Mat_2025


